Smooth L1 Loss#
【动机】 Smooth L1 Loss完美的避开了L1和L2 Loss的缺点
- L1 Loss的问题:损失函数对x的导数为常数,在训练后期,x很小时,如果learning rate 不变,损失函数会在稳定值附近波动,很难收敛到更高的精度。
- L2 Loss的问题:损失函数对x的导数在x值很大时,其导数也非常大,在训练初期不稳定。
【分析】
$$ smooth_{L1}(x)=\begin{cases}
0.5x^2, &if \left|x\right| <1 \
\left|x\right| - 0.5, &otherwise
\end{cases}$$
SmoothL1对x的导数为:
$$\frac{dsmooth_{L1}(x)}{x} = \begin{cases}
x, &if\left|x\right|<1\
\plusmn1, & otherwise
\end{cases}$$
$$
实际使用时:
L_{loc}(t^u,v)=\sum_{i \in {x, y,w,h}}smooth_{L1}(t_i^u-v_i)
$$
其中, $v_i=(v_x, v_y, v_w, v_h)$表示真实框坐标,$t_i^u=(t_x^u, t_y^u, t_w^u,t_h^u)$表示预测框的坐标,即分别求4个点的loss,然后相加作为Bounding Box Regression Loss.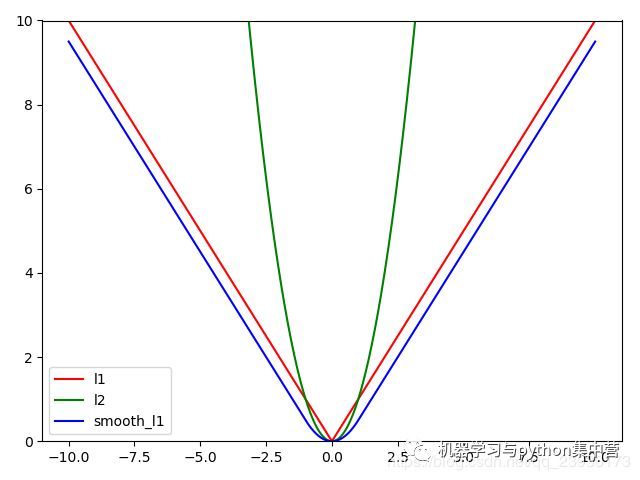
【不足】 Smooth L1 Loss在计算目标检测的 bbox loss时,都是独立的求出4个点的 loss,然后相加得到最终的 bbox loss。这种做法的默认4个点是相互独立的,与实际不符。举个例子,当(x, y)为右下角时,w h其实只能取0。
IoU Loss(2016)#
【动机】 针对smooth L1没有考虑box四个坐标之间相关性的缺点
【分析】 通过4个坐标点独立回归Building boxes的缺点:
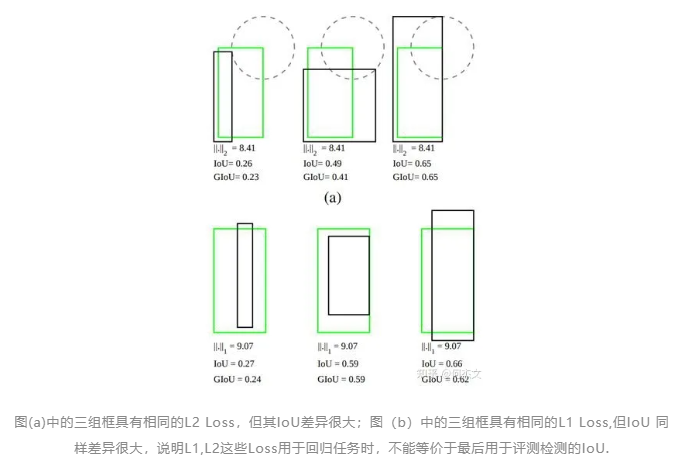
- 检测评价的方式是使用IoU,而实际回归坐标框的时候是使用4个坐标点,如下图所示,是不等价的;L1或者L2 Loss相同的框,其IoU 不是唯一的;
- 通过4个点回归坐标框的方式是假设4个坐标点是相互独立的,没有考虑其相关性,实际4个坐标点具有一定的相关性;
- 基于L1和L2的距离的loss对于尺度不具有不变性;
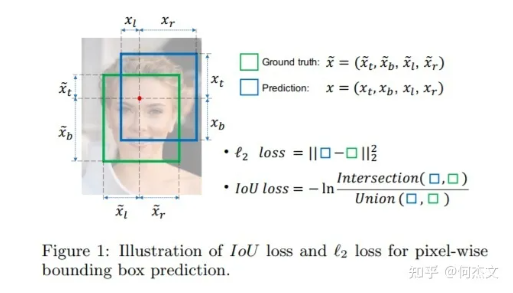
IoU Loss定义如下:
$$Iouloss = -ln(IoU(bbox_{gt},bbox_{pred}))$$
实际可简化为:
$$IoUloss=1-IoU(bbox_{gt},bbox_{pred})$$
【不足】
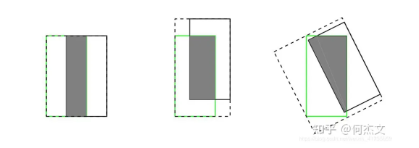
- 当预测框和目标框不相交,即 IoU(bbox1, bbox2)=0 时,不能反映两个框距离的远近,此时损失函数不可导,IoU Loss 无法优化两个框不相交的情况。
- 假设预测框和目标框的大小都确定,只要两个框的相交值是确定的,其 IoU 值是相同时,IoU 值不能反映两个框是如何相交的。
GIOU loss(2019)#
【动机】 解决IoU Loss没有考虑两个框是如何相交
【分析】
GIoU定义如下:
$$GIoU = IoU - \frac{\left|C-\left|A \cup B \right|\right|}{C}$$
实际使用时:
$$Loss_{GIoU}=1-GIoU$$
- GIoU 取值范围为 [-1, 1],在两框重合时取最大值1,在两框无限远的时候取最小值-1;
- 与 IoU 只关注重叠区域不同,GIoU不仅关注重叠区域,还关注其他的非重合区域,能更好的反映两者的重合度。
【不足】 当真实框完全包裹预测框的时候,IoU 和 GIoU 的值都一样,此时 GIoU 退化为 IoU, 无法区分其相对位置关系。
DIoU Loss(2019)#
【动机】 解决GIoU Loss缺点当真实框完全包裹预测框的时候,IoU 和 GIoU 的值都一样,引入距离
【分析】
基于IoU和GIoU存在的问题,作者提出了两个问题:
- 第一:直接最小化预测框与目标框之间的归一化距离是否可行,以达到更快的收敛速度。
- 第二:如何使回归在与目标框有重叠甚至包含时更准确、更快。
好的目标框回归损失应该考虑三个重要的几何因素:重叠面积,中心点距离,长宽比。
- 针对问题一,作者提出了DIoU Loss,相对于GIoU Loss收敛速度更快,该Loss考虑了重叠面积和中心点距离,但没有考虑到长宽比;
- 针对问题二,作者提出了CIoU Loss,其收敛的精度更高,以上三个因素都考虑到了。
DIoU Loss 的定义如下:
$$Loss_{DIoU}=1-IoU+\frac{\rho^2(b,b^{gt})}{c^2}$$
其中$\rho()$表示预测框和真实框中心点欧氏距离,c表示预测框和真实框最小外界矩形的对角线距离,如下图所示: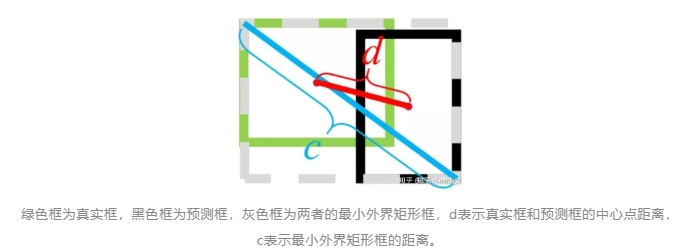
当2个框完全重合时,
$Loss_{DIOU}=Loss_{GIOU}=0$
当2个框不相交时:
$Loss_{DIOU}=Loss_{GIOU}=2$
【不足】 边框回归的三个重要几何因素:重叠面积、中心点距离和长宽比,DIoU 没有包含长宽比因素。
CIoU Loss(2019)#
【动机】 解决DIoU loss没有包含长宽比因素的不足
【分析】
CIoU的惩罚项是在DIoU的惩罚项基础上加了一个影响因子。
CIoU Loss定义为:
$$Loss_{CIOU}=1-IoU +\frac{\rho^2(b,b^{gt})}{c^2} + \alpha v$$
其中$v=\frac{4}{\pi}(\arctan {\frac{w^{gt}}{h^{gt}}} - \arctan {\frac{w}{h}})^2$
用于做trade-off的参数$\alpha=\frac{v}{(1-IoU)+v}$
【不足】 在CIoU的定义中,衡量长宽比过于复杂,从两个方面减缓了收敛速度
- 长宽比不能取代单独的长宽,比如$w=kw^{gt},h=kh^{gt}$ 都会导致v=0;
- 从v的导数可以得到$\frac{\partial v}{\partial w}=-\frac{h}{w}\frac{\partial v}{\partial h}$ ,这说明$\frac{\partial v}{\partial w}$ 和 $\frac{\partial v}{\partial h} v$ 在优化中意义相反。
EIoU Loss(2021)#
【动机】 解决CIoU的定义中不足
【亮点】 引入了解决样本不平衡问题的Focal Loss思想
【分析】将CIOU的$\alpha v$取代为$\frac{\rho^2(w,w^{gt})}{C_w^2}+\frac{\rho^2(h,h^{gt})}{C_h^2}$
EIoU Loss的定义为:
$$Loss_{EIoU}=1-IoU + \frac{\rho^2(b,b^{gt})}{c^2}+ \frac{\rho^2(w,w^{gt})}{C_w^2}+\frac{\rho^2(h,h^{gt})}{C_h^2}$$
Focal-EIoU Loss的定义为:
focal loss可以理解为对损失加权,常见的分类focal loss为:
$FL(p_t)=-\alpha_t(1-p_t)^\gamma log(p_t)$
最后得到:
$Loss_{focal-EIoU}=IoU^\gamma Loss_{EIoU}$